




Due to the global epidemic, the textile industry has experienced an off-season that lasted for more than a year. Affected by environmental protection policies and foreign trade environment, the life of small and medium textile enterprises is really sad. However, under this premise, wage levels are rising rapidly. Many textile companies are facing significant recruitment difficulties and expensive employment. Many textile general workers require annual costs of 60,000 or even more than 100,000.
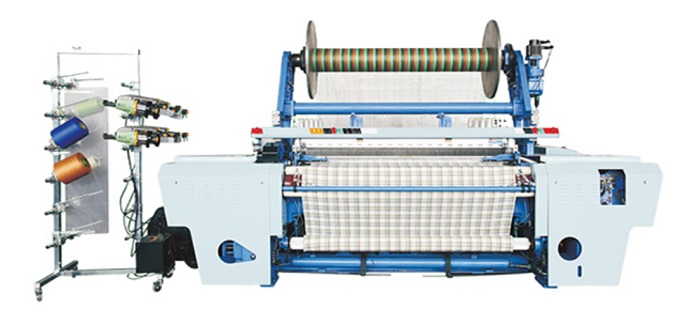
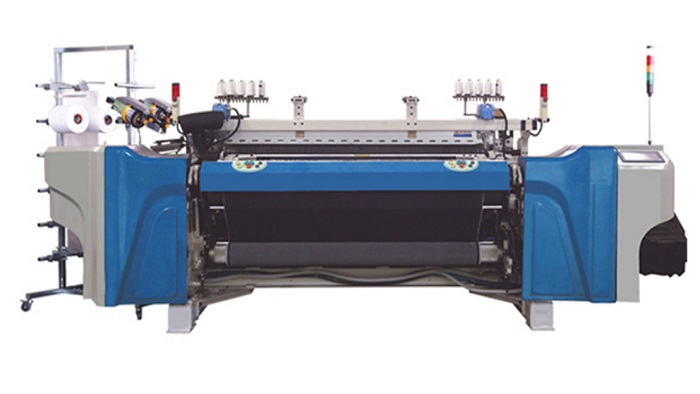
Especially in the textile link, which consumes a lot of labor, the intelligent rapier loom is a good choice, so that the links that originally required a large amount of manual assembly line operation are replaced by machinery. Suntech’s intelligent rapier loom also perfectly integrates the automatic cloth inspection function. The most labor-intensive cloth inspection link is intelligent, reducing a lot of labor costs. So what is the working principle of the rapier loom?
At present there is a great profusion of types of rapier looms on the market, both in terms of their markers and of their design. Furthermore, as regards loom design there is diversity at two levels; at the strategic level, of decisions about the general method to be used, such as whether or not to use rigid rapiers: at the tactical level , of decisions about, say, the type of rapier drive used to put a given design strategy in to effect. The present article is concerned only with the first of these types of diversity, giving an introductory account of the general methods employed in rapier looms and their implications. It is intended to discuss the mechanisms used for rapier actuation in a further article.(try suntech Loom)
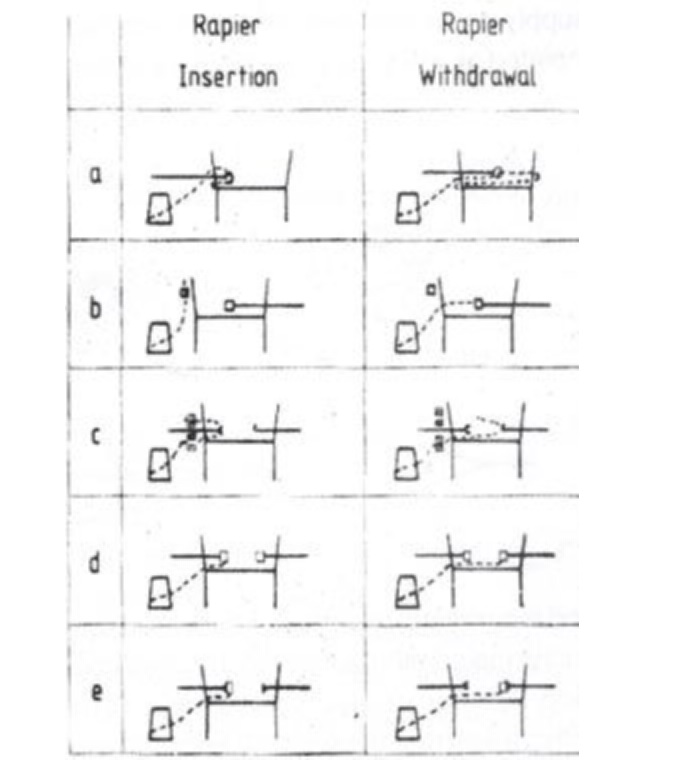
The main distinctions as regards weft-insertion methods are illustrated in Fig. 1. ln the simplest cases, in each loom cycle' the tip of a single rapier is inserted across the whole width of the shed and then withdrawn, weft being inserted during rapier motion in one direction only. Because the progress of shedding and beat-up is inhibited over the whole period for which the rapier is in the shed, the loom cycle is not utilized efficiently, and only a few looms use this method: is has the merit that problems of weft transfer do not arise. Furthermore, if double picks are inserted there is no need to cut the weft, no weft waste, and one selvedge is automatically secured. The loops of weft at the other selvedge can be secured either b knitting them together or with a catch thread. The rapier can simply have the weft permanently threaded through a hole near its tip, and it must then enter the shed from the weft supply side(Fig. la). This technique is widely used on narrow fabric looms and on carpet looms, but otherwise on a few special-purpose machines. If single picks are inserted then, of course, the normal range of weaves can be produced, but looms using this technique are slow running and it too is not often used (Fig. 1 b; for relative speeds see reference 1).
Normally, two rapiers enter the shed from opposite ends a(ld the weft is transferred from one to the other when they meet, and they are-then withdrawn. In this way, the intervals for rapier insertion and for rapier withdrawal are both used for weft insertion. Invariably, on full width looms, only a single pick of yarn from a given supply package is inserted, but it may be inserted as a loop up to the time of transfer.
and the transferred loop straightened out during rapier withdrawal from the shed (the loop-transfer or Gabbler system). Yarn withdrawal from the weft package is thus completed at the time of transfer. This has the disadvantage that prior to the transfer the rate of weft withdrawal from the up ply package is' high (it equals twice the rapier velocity), and subsequently it is zero; also after transfer the free end of the pick could untwist (Fig. 1 cO. Loop transfer was at one time widely used as it can facilitate the formation of semi-conventional selvedges, but it is now available as one of the options on only a few looms. With loop transfer the use of some form of weft accumulator is often standard.
Thus, almost invariably it is the cut end of the weft which is transferred (end or tip transfer, also known as the Dewas system, Fig. 1 d). This entails incorporating yarn clamps in the head of both the giver and taker rapiers, instead of just yarn.
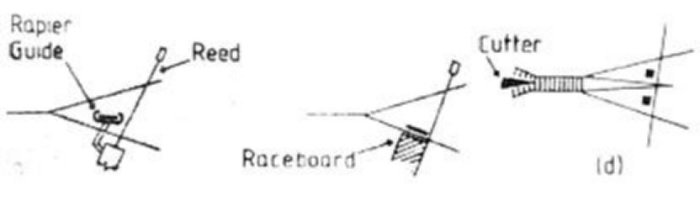
guides. There is a continuing development of new techniques to improve weft control or conditions during the weft-transfer operation, and four quite different strategies may be noted. First, the yarn clamps in the rapier heads can be positively actuated at the transfer (in addition to any positive actuation at weft pick-up and release) as on the Dornier and Iwer K2-330 100ms.Second, control of rapier location (perpendicular to the. weft direction) during the transfer can be improved. Note the guidance of the rapier head by the reed and race board on some rigid rapier loom such as the MAV, and the use of electromagnets in the central zone of the race board on the Meteor loom, for instance.
Third, the rapier displacement-timing characteristic may be elaborated with the aim of giving more favorable conditions in the transfer region. As an example, we may note the varying pitch along the screw-cam on the Vamatex Propeller loom. Fourth, there is the use of indirect transfer. That is, problems of yarn handing during transfer are avoided, by transferring the yarn clamp from one rapier to the other than the weft yarn itself, which remains gripped by the same clamp throughout (Fig.1 e.)
If indirect transfer is used to insert weft from only one side of the loom, a given yarn clamp will have to be returned empty o the supply side ,after use, and different methods of doing so are encountered on the two currently available looms. On the Acutis loom there are several yarn clamps, and these are returned empty to the supply side by a conveyor running under the weaving zone, in a manner reminiscent of the Sulzer machine. On the Mintiss each rapier enters the shed carrying a clamp, and these are exchanged at transfer, one bringing yarn from the supply side, the other returning empty.
The ability to insert single pick is usually required, to give the normal range of weaves, but some weaves can be produced most efficiently if in addition, when required, picks of more than one yarn can be inserted together in a single-loom cycle. It is only possible for given yarns to be inserted dither together in this way or separately, as required, on shuttle-less looms, and this facility has been provided on some rapier looms eg Dornier Iwer.
(The possibility of simultaneously inserted picks twisting needs to be considered though.)
Finally, it may be remarked that now a days rapier looms almost always insert weft from one side of the loom only. Apart from avoiding the need to duplicate the weft supply and selection systems, each rapier has then to perform only one role, that of giver or taker, and can be designed specifically for that role. Insertion from both sides was common, since it can readily be used together with loop transfer to produce semi-conventional selvedges.
Types of Rapiers
The rapiers used for weft insertion usually take the form either of rigid rods or of flexible metal or plastic tapes or bands. Both rigid and flexible rapiers have long been used on comparable numbers of makes of loom. Rigid 'rods can, of through the shed from outside the working width. In some cases, though, guidance within the working width is provided at the shed boundary by a board, possibly aided by the upper warp sheet or reed, or both, presumably to facilitate control over rapier location at weft transfer. In contrast, rapiers consisting of flexible tapes must always be guided within the working width. In some cases the rapiers are guided at the shed boundary as described, but more often guide plates mounted on the slay at short intervals across the width are used. The motion given to the plates is such that they enter the shed through the bottom warp sheet as the sley moves back, and leaves by the same route prior to beat-up.
Rigid-rapier method lends itself to simultaneously inserting weft in two sheds one above the other, using a separate pair of rapiers for each shed, Rapier looms of this kind have been found to have advantages for the face to face weaving of warp-pile fabrics, and such looms are also available for weaving two separate fabrics without pile, one above the other.
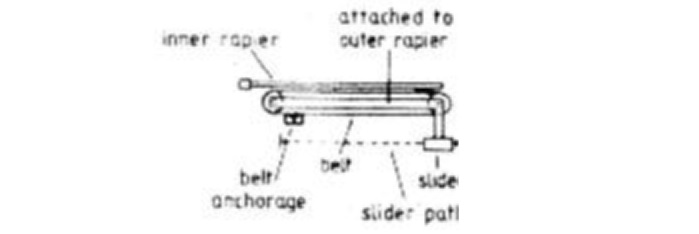
A third type of rapier has recently come into use . Like the rig i d rapier this has lateral rigidity, but consists of two or three 'telescopic' components. One component is connected directly to the rapier drive, and its weft-way position determines that of the second component, by means of a mechanism such as, the rapier thus becomes fully extended when' inserted in to the shed, and the components telescope together when it is withdrawn.
Rapier Mounting
The form of slay motion used on a rapier loom is affected by where the rapiers are mounted. Thus, the warp-way position of the rapier, relative to the fell, has to be such that the shed formed with the given heald motion is big enough for them. In addition, it is essential that the rapier be kept out of the way of the reed, even though a large part of the cycle (typically about two thirds) is normally used for weft insertion on rapier looms. Two mounting arrangements have to be distinguished, In the first, the rapier are mounted on the slay and so share is warp way movement. This means there is no question of collision between reed and rapier, and the rapier can be guided within the working width. The slay motion can be continuous, and the slay can have a simple crank drive. The slay can have a simple crank drive, the slay mass is, however, increased by having to carry the. Rapier, and the rapier-driving mechanism has to be one able to transmit motion from a fixed driving shaft to the moving slay.
The alternative arrangement is to mount the rapier in a fixed location on the loom frame, which simplifies the problem of transmitting motion to them. However, with a fixed mounting rapier guidance cannot be provided by a continuously moving slay, either inside the shed or at its boundaries. Moreover, a continuously moving reed would have to move much further away from the fell than the rapier. With rapiers mounted on the loom frame, therefore, the sley is normally cam driven and dwells virtually throughout the rapiers' motion in the reed path.
Nevertheless, in a few cases a continuously moving crank-actuated sley is used in conjunction with rapiers which are mounted on the loom frame. The rapiers may enter the shed nearer the fell than is usual and the sley moves back well beyond the rapier path. If the rapiers are in the shed for the usual fraction of the cycle, the distance from fell to rapier path has to be substantially less than the range of sley motion, and reducing the fell to rapier distance helps to keep this range down to an acceptable level. A smell shed size at the point of rapier entry is a disadvantage with warps liable to fail to form a clear shed. However. Such looms have established themselves and combine avoidance of the expense of a cam-driven sley with a simplification of the problem of actuating the rapiers.
In the former case the rapiers have to move further out beyond the selvedges than is necessary for weft insertion, to reconcile their continuous motion with the need to keep them clear of the working width until the weft-insertion stage of the cycle recurs. This has the disadvantage that the rapier reaches the point at which the weft is to be picked up having already attained a substantial fraction of its maximum velocity. On being picked up by such a rapier the weft velocity picked up by such rapier the weft velocity is abruptly increased from zero to a high value. Against this, the rapier drive can be a simple robust and relatively inexpensive crank-actuated mechanism.
A rapier displacement timing curve for a rapier whose path length is confined to that needed for weft insertion. This displacement has therefore to be confined to the appropriate part of the loom cycle too, and such motion is readily obtained from a cam actuated mechanism. During rapier displacement the forms of the two curves in Fig. 4 are the same, and it is clear that the velocity at which the weft is picked up is lower for the intermittent motion. the pickup velocity may still be appreciable though, as rapier velocity can increase very rapidly near the beginning of the displacement. During a Sino soidal displacement for example, a rapier would reach 0.4 of its maximum velocity within the first 5 percent of its range of motion.
Continuity of Rapier Motion
A distinctive feature of most rapier looms is that the weft'is attached to the insertion element, the rapier in this case, at a point near the entrance to the shed, rather than at the point from which it begins its motion - as on the Sulzer for example, or permanently -as on the shuttle loom (this enables multicolor weft devices to be particularly simple on rapier looms). Consequently weft insertion begins at whatever velocity has been attained by the rapier when weft is to be picked up.
In all cases the reciprocating weft way motion of the rapiers, in and out of the shed, is such that are kept out of the shed, is such that they are kept out of the shed (or, if they are mounted on the loom frame, out of the sweep of the reed) sufficiently for it to be changed and the weft beaten up. The rapiers are usually out of the shed for about a third of the cycle, and there are two main cases to be distinguished - that of continuous rapier motion throughout the cycle, and that of intermittent motion with a rapier dwell outside the shed. In the former case the rapiers have to move further out beyond the selvedges than is necessary for weft insertion, to reconcile their continuous motion with the need to keep them clear of the working width until the weft insertion stage of the cycle recurs. This has the disadvantage that the rapier reaches the point at which the weft is to be picked up having already attained a substantial fraction of its maximum velocity. On being picked up by such a rapier the weft velocity picked up by such rapier the weft velocity picked up by such rapier the weft velocity is abruptly increased from zero to a high value. Against this, the rapier drive can be a simple robust and relatively inexpensive crank actuated mechanism.
A rapier displacement timing curve for a rapier whose path length is confined to that needed for weft insertion. This displacement has therefore to be confined to that needed for weft insertion. This displacement has therefore to be confined to the appropriate part of the loom cycle too, and such motion is readily obtained from a cam actuated mechanism. During rapier displacement the forms of the two curves are the same, and it is clear that the velocity at which the weft is picked up is lower for the intermittent motion. The pick up velocity may still be appreciable though, as rapier velocity can increase very rapidly near the beginning of the displacement. During a sinusoidal displacement for example, a rapier would reach 0.4 of it maximum velocity with in the first 5% of its range of motion.
An interesting intermediate case arise when the rapier drive generates 'a continuous motion and the rapiers are mounted on tr1c sley. The rapier motion then depends on the combined effects of the drive and the motion of the sley, which can result in the rapiers having a quasi-dwell when they are withdrawn from the shed, as occurs on the Picanol PGW loom.

Transfer Velocity
It is the simplest forms of weft transfer the displacement -timing curves for the two rapiers are in phase, and the rapiers will be considered to meet and transfer the weft when they are furthest in to the shed and reversing their direction of motion. This for continuous rapier motion and the corresponding curve for the weft is shown by the broken line*. Thus although the transfer system enables the weft to be inserted during both the rapier insertion into the shed and withdrawal from it, the weft-insertion velocity drops to zero at the moment of transfer. Only a limited interval is available for weft insertion over the required distance and this fall in velocity is not in itself desirable.
Zero transfer. Velocity can be avoided by arranging for the two rapiers to be moving in the same direction during transfer, as shown if Fig. 5b for example. However, this entails other changes, which are not in themselves advantageous. The rapiers have to travel further in to the shed for instance, and may also be in it for a smaller fraction of the cycle.
Shows only one of the types of position timing curve by which nonzero transfer velocity could be attained, but their relative merits, and the balance of advantage and disadvantage in anyone case, have still to be fully analyzed. Detailed studies of the extent to which such possibilities are exploited in practice are also lacking.

Overall Width and Working Width
Flexible rapier looms are often made in working widths ranging from about 11/2 m to 4m. When the rapiers are with drawn from the shed each is either wrapped round the circumference of a drum or, more often, enters a C-shaped guide, the lower part of which may pass under the loom. In either case, in practice, the space needed for that part of the loom lying outside the working width is generally constant for a given model of loom, regardless of the value of the working width, W.
The overall width (A) can therefore be written as A = W + Kf (1) and the constant Kf is about 3m.
On a rigid-rapier loom when the rapiers are withdrawn from the shed they must project outside the working width by amounts totalling at least W. For any given W,rigid-rapier looms generally have a greater overall width than flexible -rapier looms; the exceptions near the narrow end of the range of W could be expected from the values of Kf Continuously moving rigid rapiers would be expected to lead to large val use of A and looms with this kind of rigid- rapier drive are normally available over only a small range of widths, up to about 2m. Looms using cam-driven rapiers are available over a wider range of widths, although this usually extends to only slightly above the range for the first group. The rei tion between A and W in this second case depends on whether-or not the rapier housings extend further outside the working width than other parts of the loom. The other loom components may be asymmetrically disposed, due to the location of the weft creel in particular, and on narrow looms the rapier housing may extend further on one side only (as in Fig. 6b)
Then A = 1.5W + Kr1 (2) When the housing extends further on both sides A = 2W + Kr2
(Eqn. 3 has been given previously for rigid-rapier 100ms5). Kr1 and Kr; are both constants, and whichever equation applies A increases with W more rapidly than on a flexible loom. For a given range of looms Eqns. 2 and 3 may both apply, each over a different part of the width range? It should ne noted that if in such cases Eqn. 3 is fitted to the data for the wider looms, it will underestimate A if used in the width range where Eqn. 2 applies, Also the deviations from Eqn. 3 are particularly marked in the important case of the Dornier loom; Eqn. 3 this over only part of the width range and if this fitted line in extrapolated to smaller val use of W it under -estimates A by up to Similarly for two -component telescopic-rapier looms, graphs of A against W with gradients of 1.5, 1.25, and (possibly)1.0 can be expected.

In response to the problem of labor shortage,Suntech has developed and produced rapier looms with 50 years of design experience and technology precipitation by integrating various textile processes with intelligent, automated, and digital applications, allowing the links that originally required a large number of manual assembly lines to be replaced by machinery. As we all know, in textile production, the most labor-intensive process is not the production process, but the finishing process, including cloth inspection and packaging. Among them, the cloth inspection process requires high skill, vision, and experience of workers, and the wages are high, and the manual cloth inspection efficiency is low and the error rate is high.
Suntech rapier looms can perform automatic machine inspection on the finished fabrics, eliminating the high cost of inspection, and the inspection effect is better than manual inspection, realizing the optimization of the textile process and the maximization of value, reducing labor and greatly Reduce labor costs and improve production efficiency.

Customers who have used Suntech rapier looms are full of praise for this loom, which can be called artificial intelligence in the loom industry. According to statistics, this loom can save 50% of labor costs and 50% on average, and increase production by 50%. Efficiency, in addition to automatic fabric inspection, it can also be controlled by PLC, automatic weft seeking, servo electronic warp let-off, servo electronic take-up, so that every step of the textile is intelligent, and the production speed is greatly improved. Welcome to inquire.
